Research
Autonomous navigation for Nano/Micro unmanned aerial vehicles
Ad hoc networking for robotic swarms
Ultra-wideband swarm ranging and positioning
Collision avoidance and path planning for UAV swarms
Swarm collaboration algorithms and applications
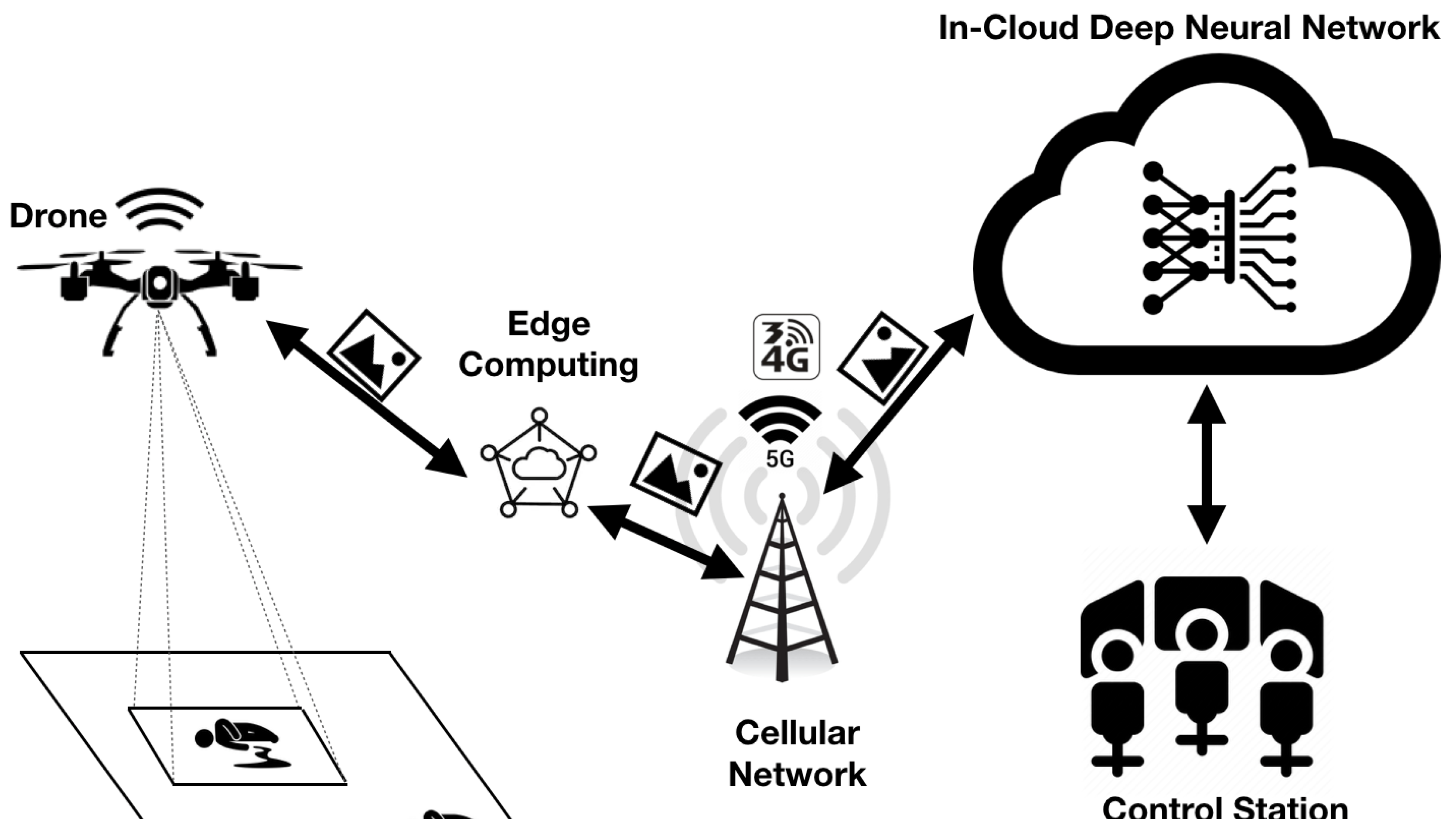
Autonomous navigation for Nano/Micro unmanned aerial vehicles
Nano unmanned aerial vehicles (NAVs) and Micro unmanned aerial vehicles (MAVs) have been increasingly used for mapping due to their advantages in weight and size, such as search, rescue and reconnaissance in confined areas. However, because the resources carried by NAVs and MAVs are extremely limited, it is a challenge to achieve efficient autonomous navigation in 3D space. To address this challenge, we proposes a new autonomous navigation model and system architecture with heterogeneous NAVs and MAVs.
Related Research
- Ruiwen Xu, Yongtao Ou, Hanjie Yu, Ziyi Zhang, Feng Shan, Weiwei Wu, and Junzhou Luo, Paper Slide
"Cooperative and Autonomous Mapping for Heterogeneous NAVs,"
2023 IEEE 20th International Conference on Mobile Ad Hoc and Smart Systems (MASS), September 25-27, 2023. Bibtex DOI
Ad hoc networking for robotic swarms
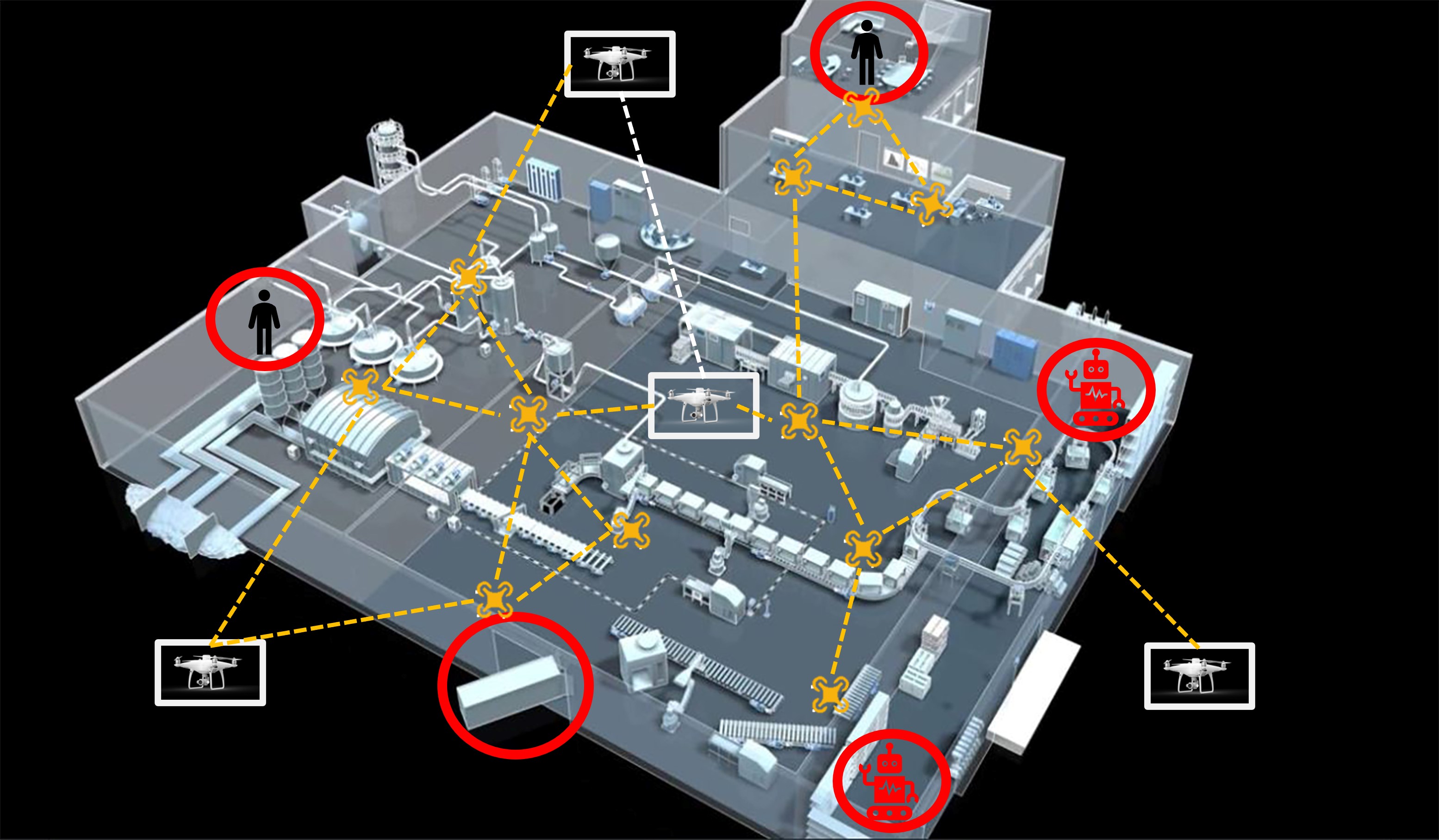
Nowadays, aerial and ground robots, wearable and portable devices are becoming smaller, lighter, cheaper, and thus popular. It is now possible to utilize tens and thousands of them to form a swarm to complete complicated cooperative tasks, such as searching, rescuing, and mapping. Low lantency ad hoc networking is critical for such applications to ensure wireless communication within such dense and dynamic swarms. This project proposes specifically designed ad hoc routing protocols for dense and dynamic swarms based on the existing optimized link state routing protocol.
Related Research
- Jianping Huang, Xiang Liu, and Feng Shan, Paper Slide
"Ballet in Sky: Online Satellite Downlink with Joint ISL Balancing and GS Selection under Uncertainty,"
IEEE SECON 2026, Pisa, Italy, June 3-6, 2026. - Yusen Zhou, Wenjia Wu, Hui Lv, Ming Yang, Feng Shan, and Junzhou Luo,
"ODGMAC: On-demand Grouping-based MAC for Dense IoT Networks,"
IEEE Transactions on Mobile Computing (TMC), Early Access, (13 March 2026). DOI - Runqun Xiong, Qing Xiao, Zhoujie Wang, Zhuqing Xu, and Feng Shan, Paper
"Leveraging lightweight blockchain for secure collaborative computing in UAV Ad-Hoc Networks,"
Elsevier Computer Networks (COMNET), vol. 251 (2024): 110612. DOI - Ziyao Huang, Weiwei Wu, Chenchen Fu, Xiang Liu, Feng Shan, Jianping Wang, and Xueyong Xu, Paper
"Communication-Topology Preserving Motion Planning: Enabling Static Routing in UAV Networks,"
ACM Transactions on Sensor Networks (TOSN) vol. 20, no. 1 (2023): 24:1-39. Bibtex DOI
Ultra-wideband swarm ranging and positioning
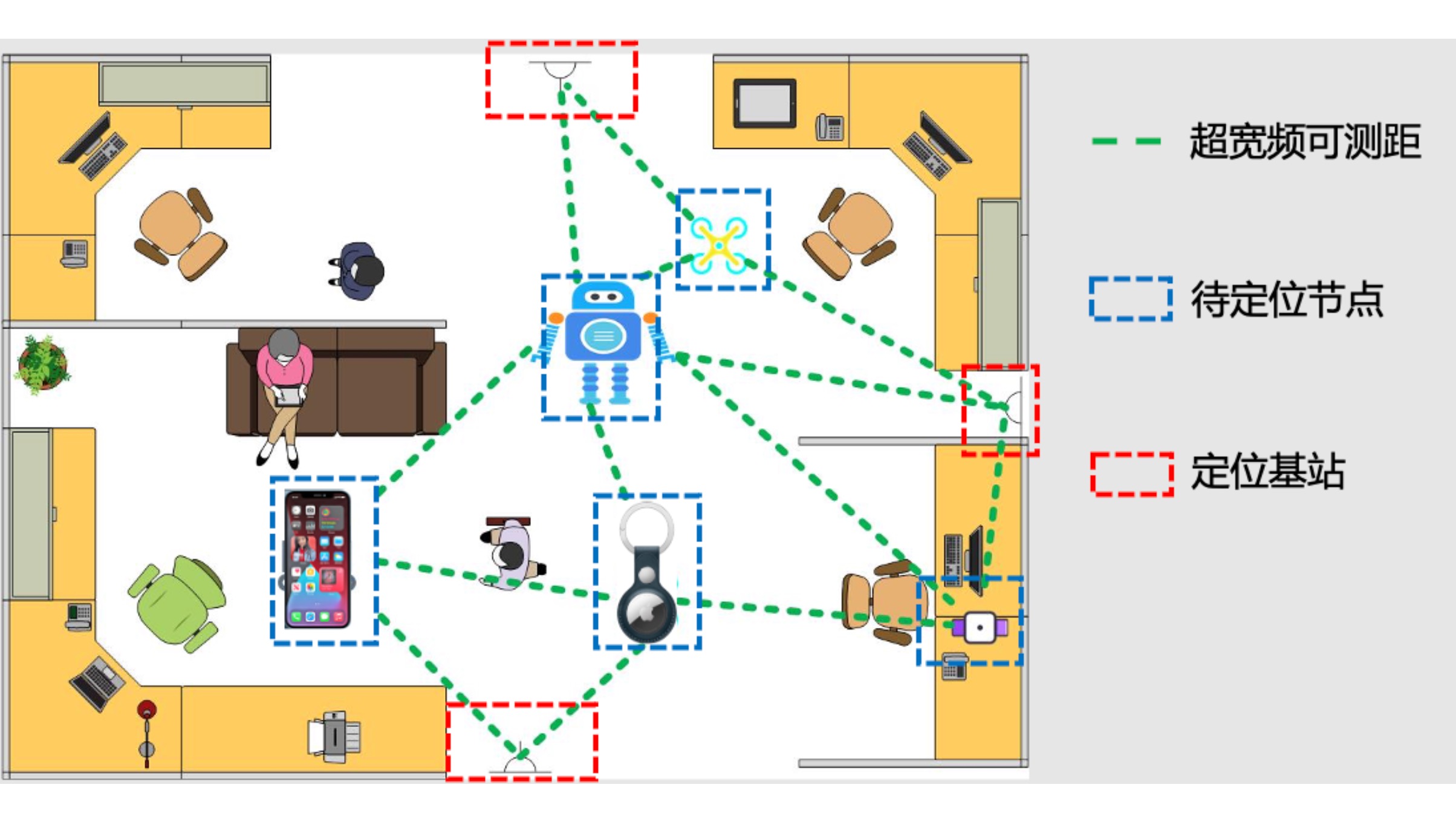
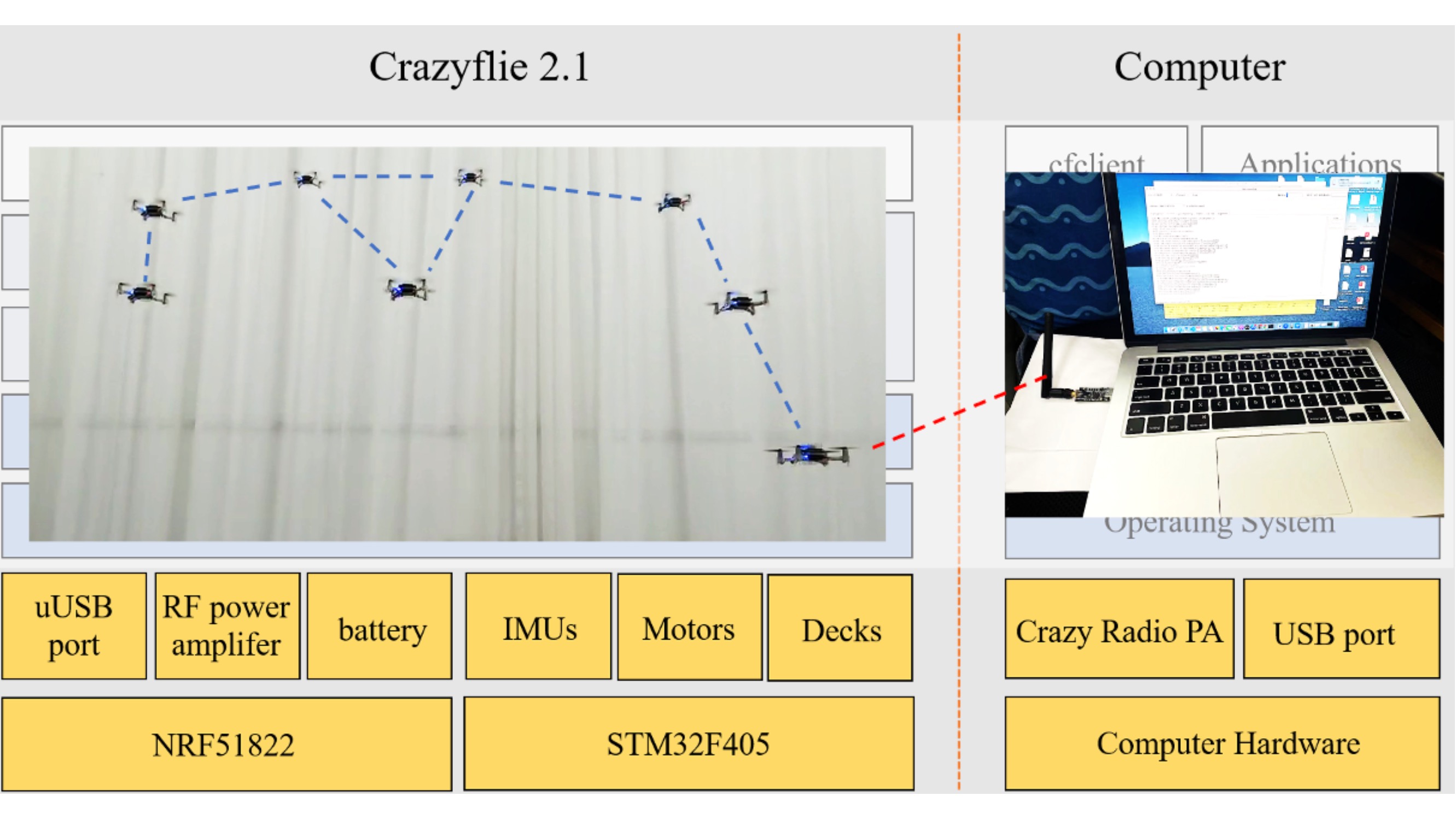
Ultra-wideband (UWB) wireless technology is becoming widely adopted in everyday life, especially after the IEEE 802.15.4z standard was published in 2020. Nowadays, the newest iPhone, and AirTags from Apple, the newest Galaxy, and SmartTag from Samsung, are all supporting UWB. In the future, not only mobile devices, but also ground and aerial robots will be equipped UWB capability. This project improves the ranging protocol and the indoor positioning for dynamic and dense swarm of devices and robots.
Related Research
- Yunxi Hou, Feng Shan, Wangxiao Mao, Jiangpeng Liu, Ye Liu, Wenjia Wu, Runqun Xiong, and Junzhou Luo, Paper Slide Code
"Optimal Swarm Ranging Protocol for Dynamic and Dense Ultra-Wideband Networks,"
IEEE INFOCOM 2026, Tokyo, Japan, May 18-21, 2026. - Shushuai Li, Feng Shan, Jiangpeng Liu, Mario Coppola, Christophe De Wagter, and Guido de Croon, Paper Slide Video Code
"Onboard Ranging-based Relative Localization and Stability for Lightweight Aerial Swarms,"
IEEE Robotics and Automation Letters (RA-L), vol. 10, no. 10, (2025):10066-10073. Bibtex DOI - Feng Shan, Haodong Huo, Jiaxin Zeng, Zengbao Li, Weiwei Wu, and Junzhou Luo, Paper Code
"Ultra-Wideband Swarm Ranging Protocol for Dynamic and Dense Networks,"
IEEE/ACM Transactions on Networking (ToN), vol. 30, no. 6 (2022): 2834-2848. Bibtex DOI - Feng Shan, Jiaxin Zeng, Zengbao Li, Junzhou Luo, and Weiwei Wu,, Paper Slide Video Code
"Ultra-Wideband Swarm Ranging,"
IEEE INFOCOM 2021, Virtual Conference, May 10-13, 2021. Bibtex DOI
Collision avoidance and path planning for UAV swarms
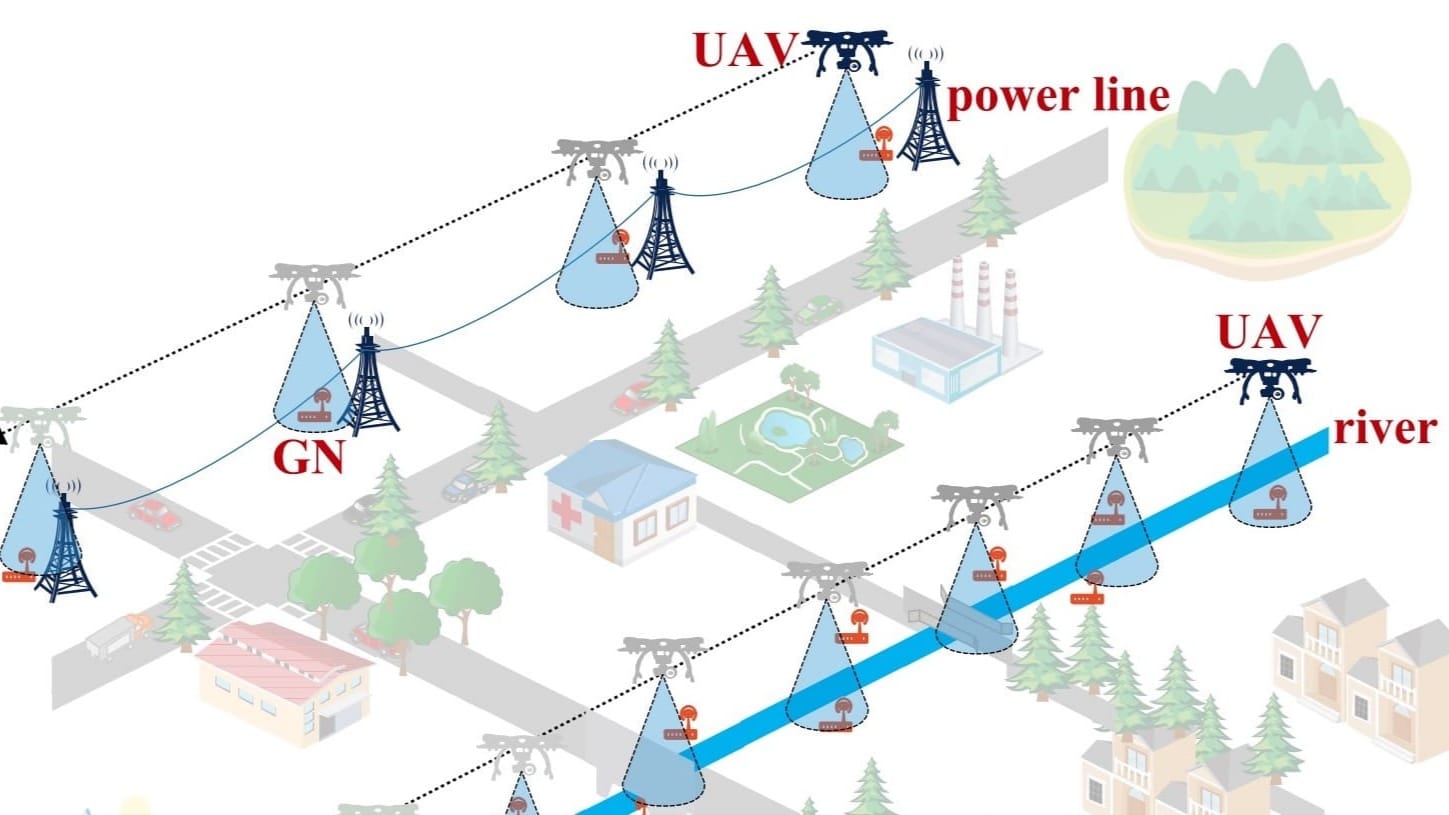
Collision avoidance is one of the essential needs of dynamic and dense robotic and device swarms. Moreover, Unmanned aerial vehicles (UAVs) are being widely exploited for various applications, e.g., traverse to collect data from ground sensors, patrol to monitor key facilities, move to aid mobile edge computing. We study the UAV path planning problem aiming at minimizing flight energy consumption, which is critical due to its limited onboard storage capacity. A practical speed-related energy consumption model is adopted, that is, the power consumption first decreases and then increases as speed increases.
Related Research
- Baixin Wan, Feng Shan, and Jianping Huang, Paper Slide
"From Docking Station to Docking Station: Completing Tasks in Minimum Time by Cooperative UAV Fleets,"
ICPADS 2025, Hefei, China, December 14-18, 2025. DOI - Yiqian Wang, Jianping Huang, Feng Shan, Yuming Gao, Runqun Xiong, and Junzhou Luo,
"Optimizing Joint Speed and Altitude Schedule for UAV Data Collection in Low-Altitude Airspace,"
IEEE Transactions on Mobile Computing (TMC), vol. 24, no. 12, (2025): 13600-13614. DOI - Jianping Huang, Feng Shan, Junzhou Luo, Runqun Xiong, and Wenjia Wu,
"ASSUME: An Optimal Algorithm to Minimize UAV Energy by Altitude and Speed Scheduling,"
IEEE Transactions on Mobile Computing (TMC), vol. 24, no. 11, (2025): 11351-11368. DOI - Jianping Huang, and Feng Shan, Paper Slide
"SLIM: Scheduling Deadline-Driven Tasks with a Minimum Number of UAVs,"
IEEE/ACM IWQoS 2025, Gold Coast, Australia, July 2-4, 2025. DOI - Ziyao Huang, Weiwei Wu, Kui Wu, Hang Yuan, Chenchen Fu, Feng Shan, Jianping Wang, and Junzhou Luo,
"LI2: A New Learning-based Approach to Timely Monitoring of Points-of-Interest with UAV,,"
IEEE Transactions on Mobile Computing (TMC), vol. 24, no. 1, (2025): 45-61. DOI - Ziyao Huang, Weiwei Wu, Kui Wu, Hang Yuan, Chenchen Fu, Feng Shan, Jianping Wang, Luo Junzhou,
"LI2: A New Learning-based Approach to Timely Monitoring of Points-of-Interest with UAV,"
IEEE Transactions on Mobile Computing (TMC), vol. 24, no. 1, (2025): 45-61. DOI - Feng Shan, Jianping Huang, Runqun Xiong, Fang Dong, Junzhou Luo, and Suyang Wang, Paper
"Energy-Efficient General PoI-Visiting by UAV with a Practical Flight Energy Model,"
IEEE Transactions on Mobile Computing (TMC), vol. 22, no. 11, (2023): 6427-6444. Bibtex DOI - Wenjia Wu, Shengyu Sun, Feng Shan, Ming Yang, and Junzhou Luo, Paper
"Energy-Constrained UAV Flight Scheduling for IoT Data Collection with 60 GHz Communication,"
IEEE Transactions on Vehicular Technology (TVT), vol. 71, no. 10 (2022): 10991-11005. DOI - Jianping Huang, Feng Shan, Runqun Xiong, Yuchao Shao, and Junzhou Luo, Paper
"Energy-Efficient UAV Flight Planning for a General PoI-Visiting Problem with a Practical Energy Model,"
IEEE ICCCN 2021, Athens, Greece, July 19-22, 2021. Bibtex DOI - Feng Shan, Junzhou Luo, Runqun Xiong, Wenjia Wu, and Jiashuo Li, Paper Slide
"Looking before Crossing: An Optimal Algorithm to Minimize UAV Energy by Speed Scheduling with a Practical Flight Energy Model,"
IEEE INFOCOM 2020, Virtual Conference, July 6-9, 2020. Bibtex DOI - Feng Shan, Jianping Huang, Runqun Xiong, Fang Dong, Junzhou Luo, and Suyang Wang, Paper
"Energy-Efficient General PoI-Visiting by UAV with a Practical Flight Energy Model,"
IEEE Transactions on Mobile Computing (TMC), vol. 22, no. 3 (2023): 6427-6444 Bibtex DOI - Ziyao Huang, Weiwei Wu, Feng Shan, Yuxin Bian, Kejie Lu, Zhenjiang Li, Jianping Wang, and Jin Wang, Paper
"CoUAS: Enable Cooperation for Unmanned Aerial Systems,"
ACM Transactions on Sensor Networks (TOSN) vol. 16, no. 3 (2020): 24:1-24:19. Bibtex DOI
UAV-aided edge computing
Millions of Internet of Thing (IoT) devices have been widely deployed to support applications such as smart city, industrial Internet, and smart transportation. These IoT devices periodically upload their collected data and reconfigure themselves to adapt to the dynamic environment. Both operations are resource consuming for low-end IoT devices. An edge computing enabled unmanned aerial vehicle (UAV) is proposed to fly over to collect data and complete reconfiguration computing tasks from IoT devices.
Related Research
- Jianping Huang, Feng Shan, and Junzhou Luo,
"SLIM+: Jointly Optimizing EIV Placement and UAV Fleet Sizing for Deadline-Driven Tasks,"
IEEE Transactions on Mobile Computing (TMC), Early Access, (06 May 2026). DOI - Weidu Ye, Junzhou Luo, Wenjia Wu, Feng Shan, and Ming Yang, Paper
"MUTAA: An Online Trajectory Optimization and Task Scheduling for UAV-aided Edge Computing,"
Elsevier Computer Networks (COMNET), vol. 218 (2022): 109405. DOI - Weidu Ye, Junzhou Luo, Feng Shan, Wenjia Wu, and Ming Yang, Paper
"Offspeeding: Optimal energy-efficient flight speed scheduling for UAV-assisted edge computing,"
Elsevier Computer Networks (COMNET), vol. 183 (2020): 107577. Bibtex DOI
Source seeking and tracking
There are various type of sources that needs to be sought or tracked, such as wireless radio sources, thermal source, nuclear radiation source, and gas leakage source. Unmanned aerial vehicles (UAVs) fly quickly and freely in the sky, so they are suitable for source seeking and tracking, especially in a time critical scenario. However, the UAV can only sense the source strenght at its current location, how to design a moving strategy such that the source is found in the minimum steps is very challenging. This project design theoretically sound solutions for this research goal and build practically working systems.
Swarm collaboration algorithms and applications
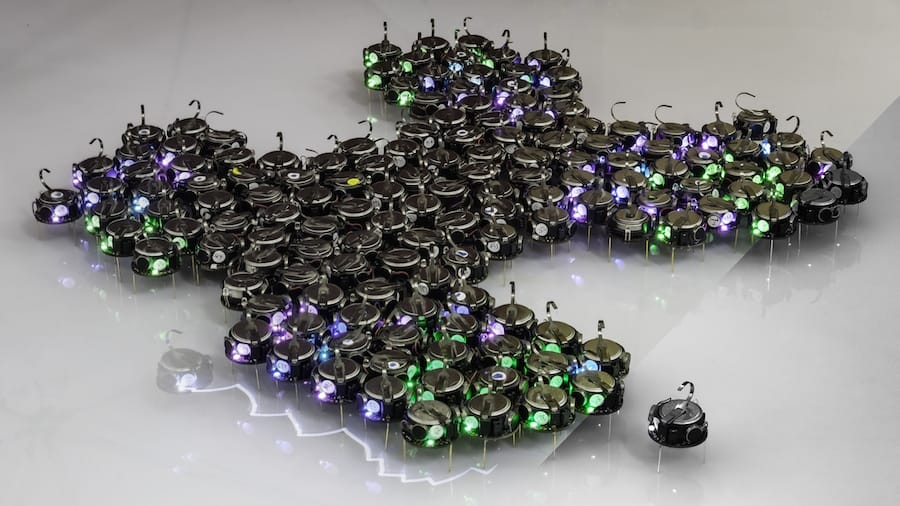
How to coordinate the collaboration for a swarm of moving things for a specific application is a challenging topic. We have made a few attempts. For example, three Crazyflie form a regular triangle with only distance information, and stage preformance.
Networking for energy harvesting systems
Energy harvesting is a promising technique to address the energy hunger problem for thousands of wireless devices. In Radio Frequency (RF) energy harvesting systems, a wireless device first harvests energy and then transmits data with this energy, hence the ‘harvest-then-transmit’ (HTT) principle is widely adopted. We must carefully design the HTT schedule, i.e., schedule the timing between harvesting and transmission, and decide the data transmission power such that the throughput can be maximized or the delay can be minimized.
Related Research
- Fangyu Zhou, Feng Shan, Weiwei Wu, Runqun Xiong, and Junzhou Luo, Paper
"Optimal Adaptive Scheduling to Maximize Throughput for Battery Constrained Time-varying RF-Powered System,"
Elsevier Computer Networks (COMNET), vol. 269 (2025): 111414. DOI - Feng Shan, Junzhou Luo, Qiao Jin, Liwen Cao, Weiwei Wu, Zhen Ling, and Fang Dong, Paper
"Optimal Harvest-then-Transmit Scheduling for Throughput Maximization in Time-varying RF Powered Systems,"
IEEE Journal on Selected Areas in Communications (JSAC) early access. DOI - Guangli Dai, Weiwei Wu, Kai Liu, Feng Shan, Jianping Wang, Xueyong Xu, and Junzhou Luo,
"Joint Sleep and Rate Scheduling with Booting Costs for Energy Harvesting Communication Systems,"
IEEE Transactions on Mobile Computing (TMC), vol. 22, no. 6, (2023): 3391-3406. DOI - Feng Shan, Junzhou Luo, Weiwei Wu, and Xiaojun Shen, Paper
"Delay Minimization for Data Transmission in Wireless Power Transfer Systems,"
IEEE Journal on Selected Areas in Communications (JSAC), vol. 37, no. 2 (2019): 298-312. Bibtex DOI - Weiwei Wu, Jianping Wang, Xiumin Wang, Feng Shan, and Junzhou Luo, Paper
"Online Throughput Maximization for Energy Harvesting Communication Systems with Battery Overflow,"
IEEE Transactions on Mobile Computing (TMC), vol. 16, no. 1 (2017): 185-197. Bibtex DOI - Feng Shan, Junzhou Luo, Weiwei Wu, and Xiaojun Shen, Paper Slide
"Optimal Wireless Power Transfer Scheduling for Delay Minimization,"
IEEE INFOCOM 2016, San Francisco, CA, USA, April 10-15, 2016. Bibtex DOI - Feng Shan, Junzhou Luo, Weiwei Wu, Minming Li, and Xiaojun Shen, Paper
"Discrete Rate Scheduling for Packets with Individual Deadlines in Energy Harvesting Systems,"
IEEE Journal on Selected Areas in Communications (JSAC), vol. 33, no. 3 (2015): 438-451. Bibtex DOI
「Older research」Energy efficient wireless networking
More and more Internet of Things (IoT) wireless devices have been providing ubiquitous services over the recent years. Since most of these devices are powered by batteries, a fundamental trade-off to be addressed is the depleted energy and the achieved data throughput in wireless data transmission. By exploiting the rate-adaptive capacities of wireless devices, we design rate-adaptive transmission policies to maximize the amount of transmitted data bits under the energy constraints of devices with deadline constraints.
Related Research
- Feng Shan, Junzhou Luo, Jiahui Jin, and Weiwei Wu, Paper
"Offloading Delay Constrained Transparent Computing Tasks with Energy-Efficient Transmission Power Scheduling in Wireless IoT Environment,"
IEEE Internet of Things Journal (IoT-J), vol. 6, no. 3 (2019): 4411-4422. Bibtex DOI - Weiwei Wu, Jianping Wang, Minming Li, Kai Liu, Feng Shan, and Junzhou Luo, Paper
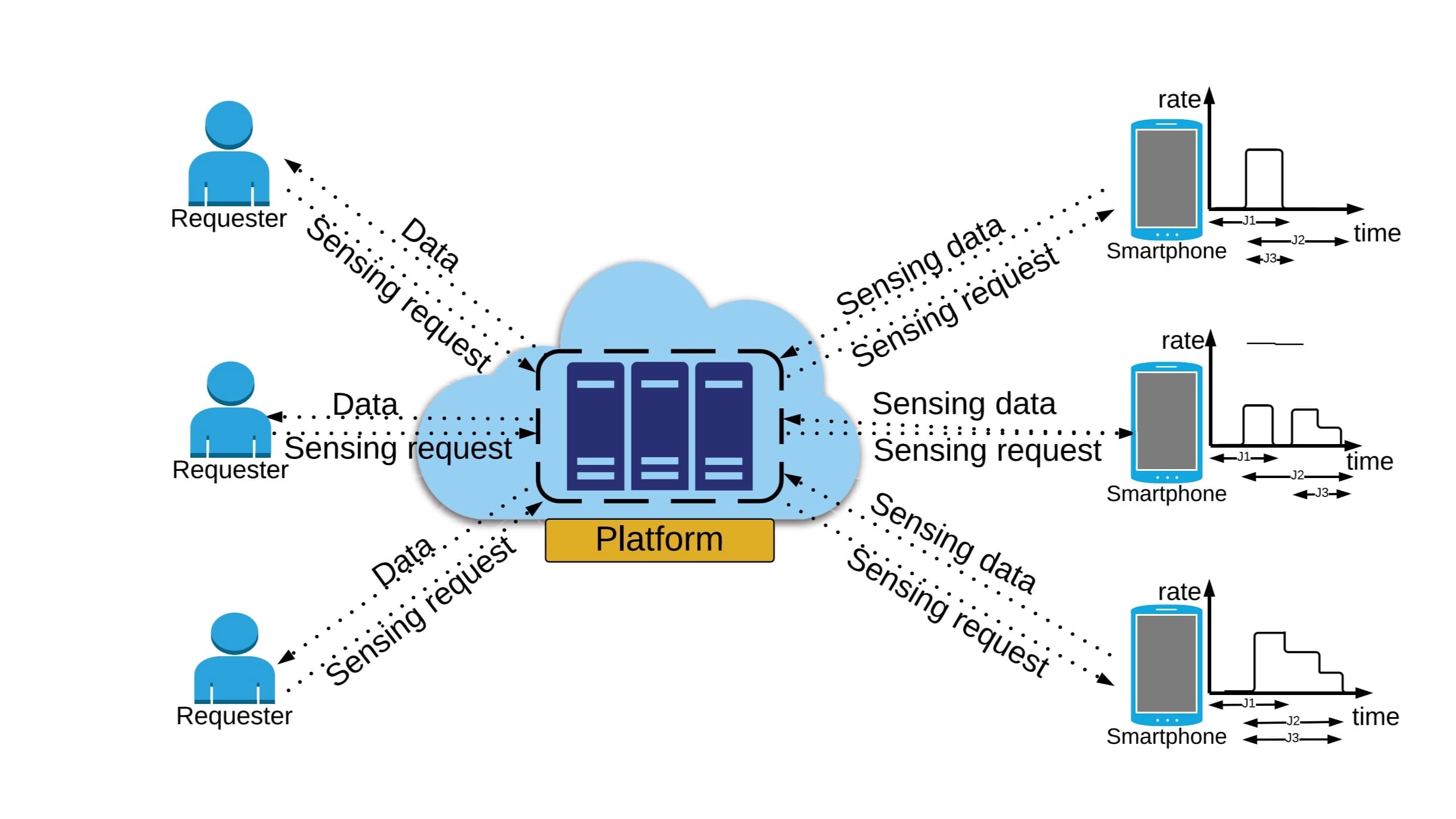
"Energy-efficient Transmission with Data Sharing in Participatory Sensing Systems,"
IEEE Journal on Selected Areas in Communications (JSAC), vol. 34, no. 12 (2016): 4048-4062. Bibtex DOI - Feng Shan, Junzhou Luo, and Xiaojun Shen, Paper
"Optimal energy efficient packet scheduling with arbitrary individual deadline guarantee,"
Elsevier Computer Networks (COMNET), vol. 75 (2014): 351-366. Bibtex DOI